Allround-robottalent in de vliegtuigbouw
In de vliegtuigindustrie wordt veel met de hand gefreesd, geboord of geassembleerd omdat de onbewerkte componenten niet alleen in hun grootte, maar ook in hun ontwerp variëren. Kleine verschillen kunnen niet worden vermeden met de extreem lichte en elastische materialen – een uitdaging voor geautomatiseerde verwerking. Samen met industriële partners hebben onderzoekers van Fraunhofer nu een mobiele robot ontwikkeld die aan deze eisen voldoet.
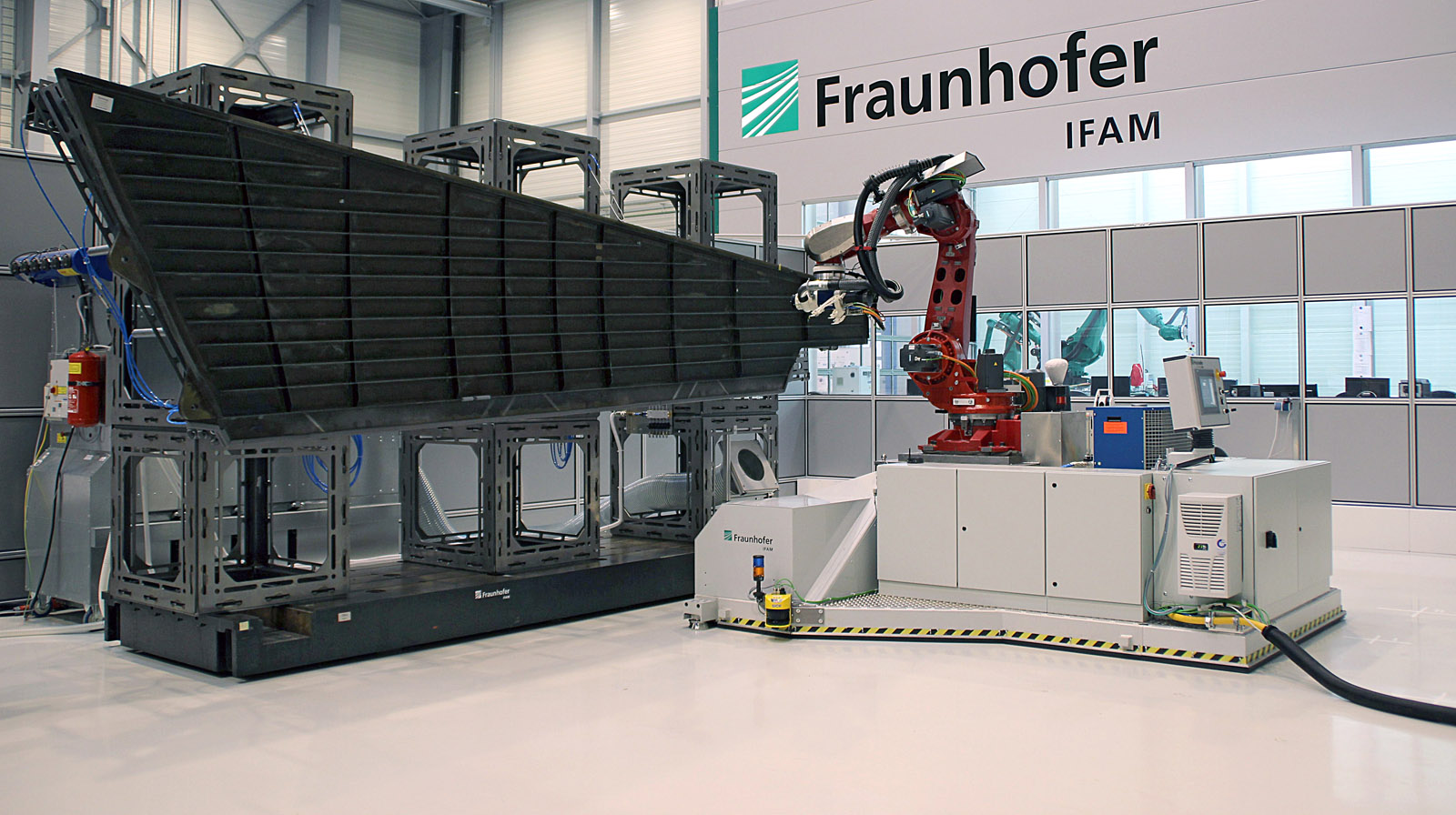
Geautomatiseerde systemen die tegenwoordig worden gebruikt in de vliegtuigbouw zijn vaak zware, op maat gemaakte portaalsystemen die langzaam over rails bewegen. Deze systemen zijn duur, niet flexibel, hebben hoge niet-productieve tijden en daarom een lage productiviteit. De robot die Fraunhofer in samenwerking met partners heeft ontwikkeld kan zelfstandig naar werkstukken rijden en daar werkzaamheden zoals meten, lijmen, boren en frezen uitvoeren. De robot kan universeel worden gebruikt en kan snel en flexibel worden aangepast aan vormafwijkingen, product- en typeveranderingen. Terwijl eerder ontwikkelde robots in dergelijke taken niet voldeden aan de hoge eisen van de luchtvaart op het gebied van nauwkeurigheid, is dit geen probleem voor de nieuwe robot: de bewerkingsafwijkingen bedragen minder dan een halve millimeter.
Meetsystemen op de assen
Vooral dankzij de integratie van speciaal ontwikkelde meetmeetsystemen kan er een hoge nauwkeurigheid gerealiseerd worden. Terwijl in conventionele industriële robots de meettechnologie aan de motor is bevestigd, bevindt bij deze robot de meettechnologie zich direct op de assen van de nieuwe robot. Andere technologieën hebben ook bijgedragen aan het verbeteren van de nauwkeurigheid van de bewerking. Deze omvatten de compensatie aan de kant van de statische wrijvingseffecten van de tandwielen en een verfijnde kalibratie van de robot, die de echte robotgeometrie bepaalt door middel van eenmalige metingen en hiermee rekening houdt bij het berekenen van de beweging.
Omdat ruimtevaartcomponenten soms wel 20 meter lang zijn, was het belangrijk om de nieuwe robot mobiel te maken. Daarom hebben ze een platform ontwikkeld met drie aandrijfwielen. Hierdoor kan de robot zich vrij bewegen in de productiehal en rijden naar waar hij nodig is. Zodra de robot zijn doelpositie heeft bereikt, trekt hij de wielen in en is stabiel.
In actie op Hannover Messe
Op de Hannover Messe van 23 t/m 27 april kan een indruk worden verkregen van de robot in een vliegtuigfabiek. Op de stand van Fraunhofer kan middels een VR-bril een rondgang worden verschaft. Daarnaast zal de robot in actie te zien zijn op de stand van Siemens.
Meer nieuws

Siemens en VDL intensiveren samenwerking voor tweede generatie Automated Guided Vehicles (AGV’s)
Siemens Nederland en VDL Automated Vehicles lanceren dit najaar de tweede generatie van hun geautomatiseerd logistiek platform op basis van …

ING: personeelstekorten zorgen voor grote uitdagingen
Structurele personeelstekorten stellen de technologische industrie voor grote uitdagingen, stelt ING in een rapport. Alles moet wijken om de toch …

Nieuwe ronde KIA subsidie: 2,5 miljoen voor circulaire maakindustrie
Op 7 mei opent de nieuwe subsidieronde van de Kennis- en Innovatieagenda Circulaire Economie (KIA-CE) voor de ontwikkeling van circulaire …

‘De maakindustrie het meest geraakt door ransomware aanvallen in Nederland’
De maakindustrie wordt het meest wordt getroffen door ransomware in Nederland. De sector incasseert 30% van alle ransomware aanvallen. Dat …