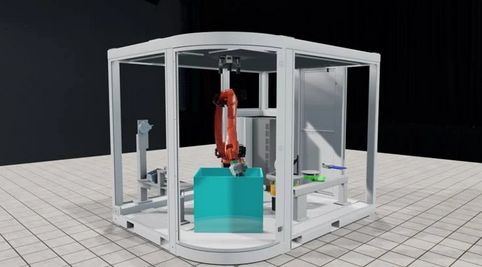
Kuka introduceert intelligente bin picking
In een bak reiken en bijvoorbeeld een schroef oppakken – zonder je arm aan de rand te stoten – is voor mensen geen uitdaging. Voor een robot ziet dat er heel anders uit. Om de robot onder de juiste hoek in de bak te laten grijpen en het juiste onderdeel te laten pakken, moet de beweging nauwkeurig worden gepland.
Als dit eenmaal is bereikt, kan de robot de mens verlossen van eentonig werk als vuilnisbakken verzamelen – en dat betrouwbaar, snel en zonder vermoeid te raken. Voor de precieze berekening van de beweging en de hoek van de robot tijdens het orderverzamelen, heeft Kuka samen met de vision expert Roboception een technologiepakket ontwikkeld dat in het productieproces geïntegreerd kan worden zonder grote programmeerinspanning.
De 3D-camera van Roboception, die deel uitmaakt van het technologiepakket, stuurt beelden van de omgeving en de te verzamelen items naar een computer voor een perfecte, botsingsvrije routeplanning. Hier wordt de exacte weg voor de robotarm tot het gewenste object berekend, waarbij ook de gegevens van de robotstructuur en de grijper in acht worden genomen. De software Kuka.SmartBinPicking berekent de meest efficiënte baan om onderdelen uit de kist te grijpen zonder dat de robotarm ergens tegenaan stoot. Door deze botsingsvrije baanplanning worden uitvaltijden tot een minimum gereduceerd. Bij het herkennen van de objecten – ongeordend of niet – prioriseert de software bovendien welke onderdelen eerst door de robot worden gegrepen. Bijvoorbeeld omdat ze bovenop liggen.
Kist
De objectherkenning wordt vooraf in een fotorealistische simulatieomgeving getraind. Daarbij wordt het CAD-model geoptimaliseerd voor kleurreacties, materialen en verlichtingsomstandigheden. “Elk object dat uit een kist moet worden gegrepen, wordt van tevoren in deze met kunstmatige intelligentie ondersteunde simulatieomgeving gedurende een bepaalde tijd getraind. Dit trainingsproces kan ’s nachts lopen, zodat de toepassing de volgende dag al kan worden gebruikt”, zegt Michael Hohenäcker, portfoliomanager voor handling en vision bij Kuka. Door het gebruik van AI wordt de herkenning van willekeurige objecten zo geoptimaliseerd dat deze ook in moeilijke scenario’s kunnen worden geïdentificeerd.
De software Kuka.SmartBinPicking biedt de combinatie van AI-gebaseerde detectie van objecten en precieze baanplanning van de robot. Met een greep kunnen de onderdelen met hoge snelheden en botsingsvrij uit een kist worden gehaald.
Kuka er dankzij de samenwerking met Roboception in geslaagd de baanplanning naar een externe computer te verplaatsen om de robotbesturing niet nodeloos te belasten. Dit heeft een duidelijk voordeel: “Terwijl de robot in de kist grijpt, wordt parallel daarmee de volgende baanplanning berekend”, verklaart Hohenäcker. Dat bespaart cyclustijden. De klanten besparen tijd ook bij de integratie van de oplossing. Door een moderne webtechnologie voor de configuratie kan de klant zijn precieze situatie in een 3D-model bekijken en de waarden in het systeem eenvoudig sturen. Daarvoor heeft de klant alleen basiskennis van robots nodig, maar geen diepgaande programmeerervaring.
Meer nieuws

Maakindustrie trekt industrie omhoog in eerste kwartaal
De Nederlandse industrie heeft in het eerste kwartaal van 2026 meer omzet geboekt dan een jaar eerder. Volgens cijfers van …

Een jaar BOOST Circulair: circulariteit als antwoord op grondstoffenschaarste
Na een jaar BOOST Circulair trekken de initiatiefnemers een duidelijke conclusie: circulariteit draait in de maakindustrie allang niet meer alleen …

ABB brengt nieuwe gerobotiseerde cel voor oppervlaktebewerking op de markt
ABB Robotics heeft een nieuwe geautomatiseerde cel voor oppervlaktebewerking gelanceerd, gericht op bedrijven die hun schuur- en polijstprocessen willen automatiseren …
‘Groeiende Europese chipvraag vraagt gerichte keuzes van overheid en industrie’
De Europese vraag naar halfgeleiders neemt de komende jaren sterk toe, vooral in sectoren waarin Europa traditioneel sterk is, zoals …