Kleinste micro-elektronische robot ter wereld heeft twin-jet-motor
Een internationaal onderzoeksteam onder leiding van de Chemnitz University of Technology heeft de kleinste micro-elektronische robot ter wereld ontwikkeld. De microrobot is 0,8 mm lang, 0,8 mm breed en 0,14 mm hoog, heeft een twin-jet-motor en verkrijgt de benodigde energie draadloos. De microrobot is ontwikkeld voor medische toepassingen, bijvoorbeeld voor het gericht toedienen van medicatie of voor de diagnose van ziekten binnen een organisme.
Een internationaal onderzoeksteam onder leiding van prof. Dr. Oliver G. Schmidt, voorzitter van Material Systems for Nanoelectronics aan de Chemnitz University of Technology, heeft een doorbraak gemaakt. Het laatste nummer van ‘Nature Electronics’ doet verslag van de ontwikkeling van de kleinste micro-elektronische robot ter wereld, die wordt aangedreven en bestuurd door een twin-jet-motor. De micro-elektronische robot is 0,8 mm lang, 0,8 mm breed en 0,14 mm hoog. De micro-robot is extreem flexibel, beweeglijk en voorzien van diverse functionaliteiten. Naast de Technische Universiteit van Chemnitz en IFW Dresden zijn ook de Technische Universiteit van Dresden en de Chinese Academie van Wetenschappen Changchun bij het project betrokken.
Medische mini-onderzeeër
Al meer dan tien jaar is er belangstelling bij wetenschappers uit verschillende disciplines voor microrobot- en micromotorisch onderzoek. Met name het concept van het gebruik van een medische mini-onderzeeër met een eigen bestuurbare aandrijving heeft herhaaldelijk zowel fundamenteel als toegepast onderzoek gestimuleerd. Het doel hiervan is om een volledig bestuurbare micro-elektronische robot te ontwikkelen. Hoewel er chemisch aangedreven micromotoren zijn die in medische studies in de VS worden getest voor het genezen van bepaalde ziekten, zijn het zeer eenvoudige systemen die geen elektrische energie of micro-elektronische eenheden aan boord hebben. Een gerichte aansturing van de microrobots is daarom niet mogelijk. Dit is veranderd met het systeem dat is ontwikkeld door Oliver G. Schmidt en zijn team, dat is gebaseerd op een idee van negen jaar oud. Bijzonder aan het project is de beschikbaarheid van een ingebouwd energiesysteem, waardoor de zeer flexibele microrobot verschillende taken kan uitvoeren. Het systeem is ook manoeuvreerbaar in een wateroplossing en kan op afstand worden bediend. Daarnaast heeft de robot een lichtbron en een micro-arm, die draadloos van stroom kan worden voorzien.
Op afstand bestuurbaar
“Bijna tien jaar geleden kwamen mijn team en ik op het idee om kleine chemische aandrijvingen te combineren met micro-elektronische componenten om twee disciplines samen te brengen die tot dan toe weinig gemeen hadden. Het is prachtig om te zien dat dit idee tot stand is gekomen en het nu experimenteel kan worden gerealiseerd in een eerste, vereenvoudigde vorm”, zegt Schmidt.
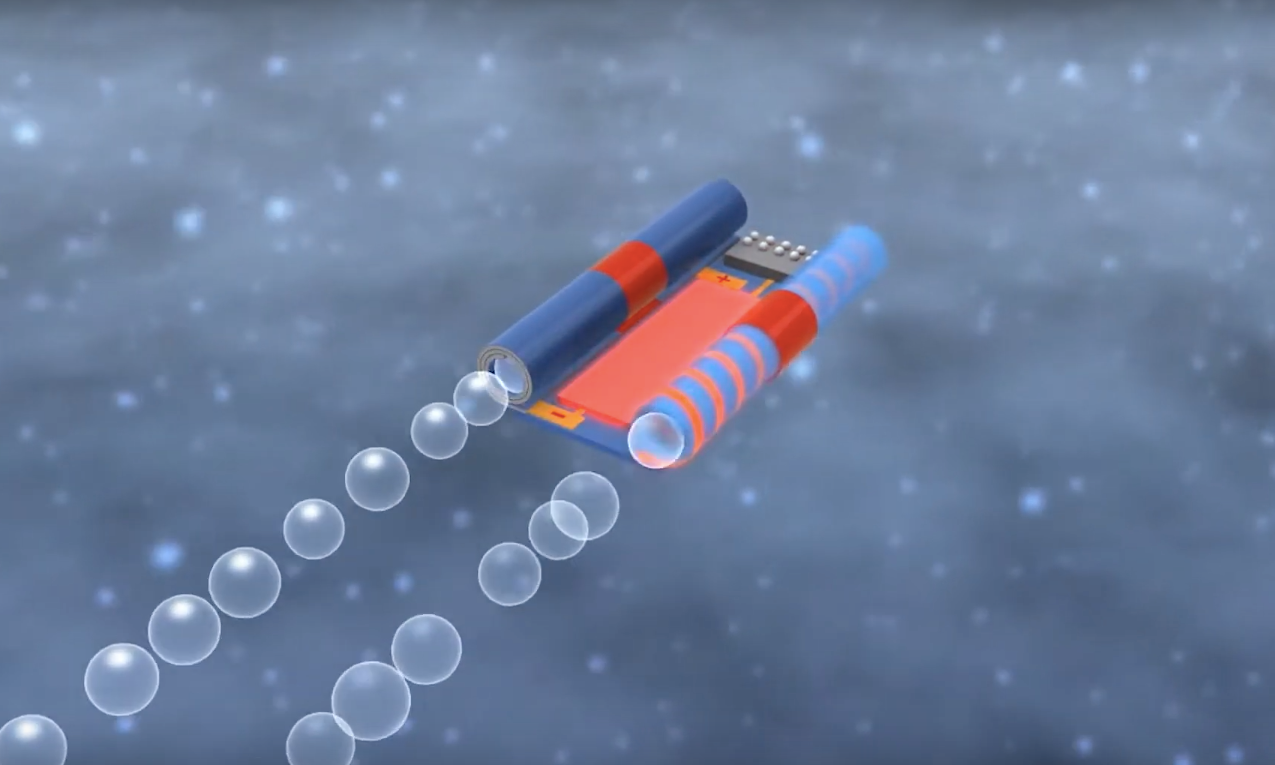
De voortstuwingseenheid van de microrobot zoals het nu wordt gepresenteerd, bestaat uit opgerolde microbuizen die stuwkracht genereren door het onder druk uitstoten van zuurstofbellen. De onderzoekers kunnen dit proces thermisch aansturen. Door luchtbellen in een van de twee microbuizen te creëren, kan de microrobot in verschillende richtingen gestuurd worden. De onderzoekers produceerden het complete micro-elektronische systeem uit een combinatie van polymeergebaseerde nanomembranen, wat een belangrijk sleutelelement in de ontwikkeling is. De constructie is mechanisch zeer flexibel en maakt de opname van elektronische componenten en bestuurbare actuatoren mogelijk. In de laatste fasen maakte het team een dunne laag van een thermoresponsief polymeer en introduceerde het als een actuator aan het ene uiteinde van het microrobotsysteem. Door de instelbare gelokaliseerde temperatuurstijging of -daling is het mogelijk om de thermoresponsieve microarm te openen en te sluiten om kleine voorwerpen te grijpen en los te laten.
Elektrische energie in een microrobot
Omdat de microrobot energie nodig heeft, maar niet simpelweg kan worden opgeladen via een stopcontact, wordt een systeem voor draadloze energieoverdracht gebruikt. Dit systeem bestaat uit een externe zender en een ingebouwde ontvangerspoel in het microsysteem. De energie wordt overgedragen door inductie – dit principe is vergelijkbaar met hoe een mobiele telefoon draadloos kan worden opgeladen. Het is voor het eerst dat de draadloze transmissie van elektrische energie gebruikt kan worden in zo’n kleine microrobot.
Met hun pionierswerk in de productie van de kleinste micro-elektronische robot met draadloze energie, afstandsbesturing, volledige manoeuvreerbaarheid en actuatoren, heeft het onderzoeksteam een belangrijke mijlpaal bereikt voor het toekomstige gebruik van autonoom werkende microrobots in de biomedische sector. Momenteel wordt de microrobot verder doorontwikkeld, zodat de robot in de toekomst in het menselijk lichaam kan worden gebruikt.
Meer nieuws

Productie industrie in maart bijna 2 procent hoger dan jaar eerder
De kalendergecorrigeerde productie van de Nederlandse industrie lag in maart 1,7 procent hoger dan in maart 2025, maakt het Centraal …

FME: investeringen blijven liggen door gebrek aan slagvaardige investeringscapaciteit
FME steunt de hernieuwde oproep voor een nationale investeringsbank en roept het kabinet op de instelling snel en slagvaardig uit …

Robotbelading als antwoord op krapte: Van Dulst zet in op slimme automatisering van lange profielen
De maakindustrie staat onder druk. Arbeid wordt schaarser, productiviteit moet omhoog en internationale concurrentie neemt toe. Tegen die achtergrond presenteerde …

Menko Eisma gaat van Trumpf naar DG Steel Group
Na 29 jaar vertrekt Menko Eisma bij Trumpf Nederland. Hij is in die tijd van verkoper van handgereedschappen gegroeid naar …